【徹底解説】NVIDIA フィジカルAIプラットフォームの全貌について
皆さんこんにちは。アプライド広域システム営業部です。
製造業や先端研究の現場において、実機を使ったトライ&エラーはすでに限界を迎えつつあります。この「時間・コスト・リスク」という重い制約を完全に払拭し、開発スピードを異次元へと引き上げるのが、NVIDIAの『フィジカルAIプラットフォーム』です。仮想空間で数万回・数億回という学習を安全かつ瞬時に行い、その結果を現実世界へシームレスに実装する「Sim2Real」のアプローチ。これは単なる概念ではなく、すでに実用化されている強力なエコシステムです。
本記事では、このプラットフォームを構成する3つのフェーズと、実装の鍵を握る具体的なライブラリ群の役割を解き明かします。
はじめに:なぜ今「フィジカルAI」なのか?
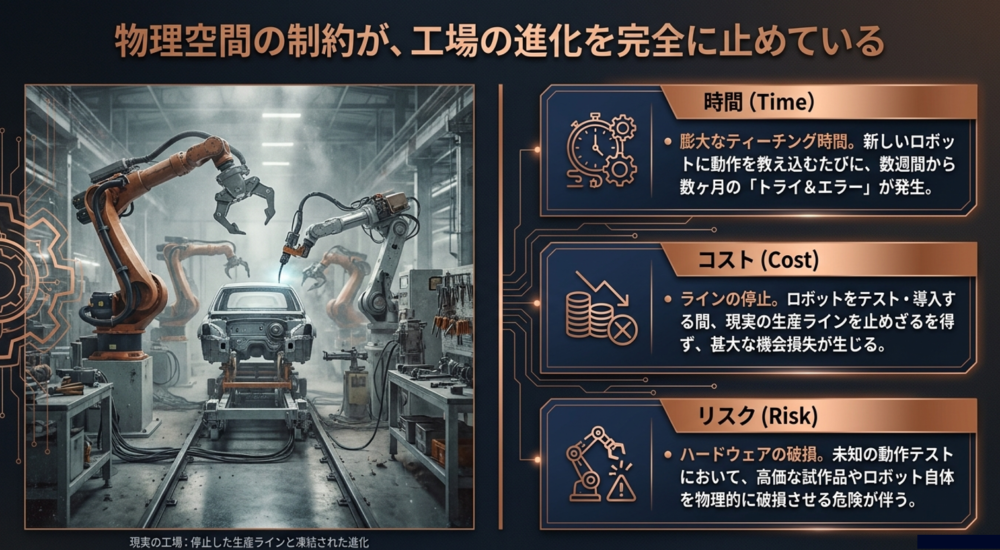
「新しい部品のピッキングを覚えさせるために、工場のラインを数週間止めなければならない」「未知の動作でロボットが周囲の機材に激突し、数百万円の損害が出た」——。
現在、多くの製造現場は、こうした「物理的な限界」に直面しています。これまでのロボットは、人間が手取り足取り(ティーチング)教え込んだ通りにしか動けませんでした。
この常識を根底から覆すのが「フィジカルAI」です。 フィジカルAIとは、単なる「指示待ちロボット」ではありません。AIが自らのカメラ(眼)で状況を把握し、脳で考え、手足を動かす技術です。この移行は、単なる設備の入れ替えではなく、次世代の工場構築における「絶対条件」となりつつあります。
膨大な時間を要するティーチング、テスト稼働に伴うライン停止のコスト、そして未知の動作によるハードウェア破損のリスク。現在、多くの製造現場におけるロボット調整や検証手法は、こうした物理的な限界に直面していますが、これらの制約を打破し、人間が一つひとつ動作を教え込む手法から、AIが自律的に状況を判断して動く「フィジカルAI」への移行が、次世代の工場構築には急務となっています。

プラットフォームの全体像:止まらない進化を生み出す3つのフェーズ
物理空間の「時間・コスト・リスク」をゼロにするためのNVIDIAの解答が、「仮想空間で全てを終わらせてから、現実へ持ち込む(Sim2Real)」というアプローチです。 現実世界でロボットに数万回の失敗をさせれば壊れてしまいますが、仮想空間(コンピューターの中)であれば、何万回失敗してもタダであり、一瞬で元通りになります。
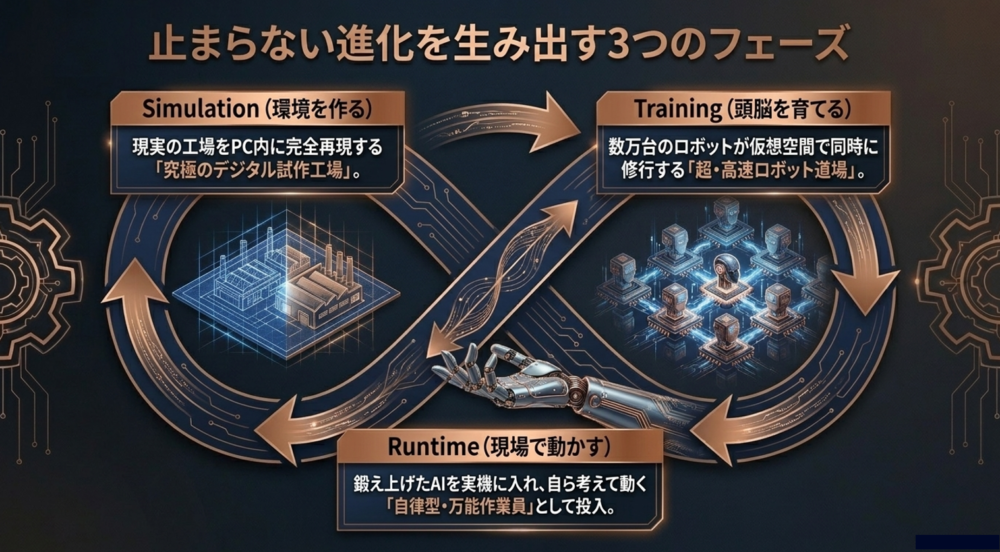
このプラットフォームは、以下の3つのフェーズが循環することで、ロボットを劇的に進化させます。
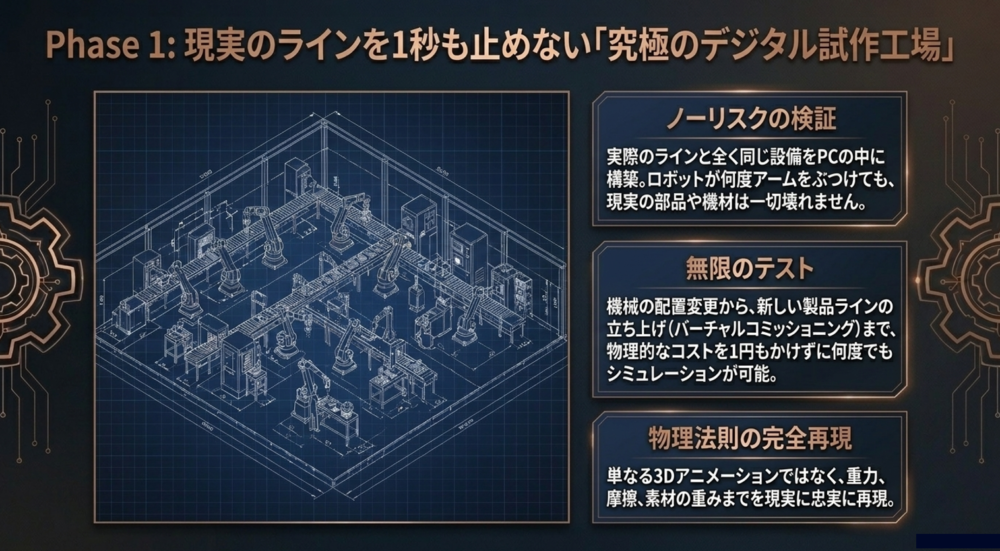
1.Simulation(環境を作る): 現実のラインを止めずに何度でも検証できる「究極のデジタル試作工場」
コンベアの速度や照明の暗さ、重力や摩擦といった物理法則まで、現実そっくりな双子の工場を作ります。
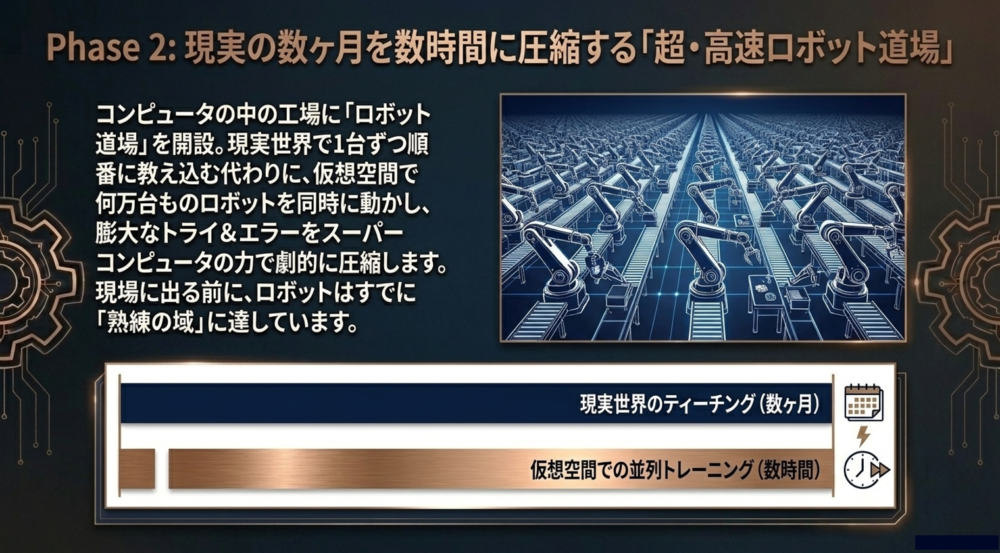
2.Training(頭脳を育てる): 現実なら数ヶ月かかるティーチングを数時間に圧縮する「超・高速ロボット道場」
仮想空間の中に1万台のロボットを並べ、同時に作業を学習させます。現実では1台のロボットが10年かかる経験を、仮想空間なら数時間で完了させることができます。
3.Runtime(現場で動かす): 鍛え上げた頭脳を実機に投入し、自ら考えて動く「自律型・万能作業員」
仮想空間で「完璧な熟練工」に育ったAIの脳だけを取り出し、現実のロボットに移植します。
フェーズ別コア・テクノロジーの役
これら3つのフェーズは、NVIDIAが提供する特化型のフレームワーク群によって強力に支えられています。それぞれの役割を現場の言葉に翻訳すると、以下のようになります。
【Simulationを支える技術】
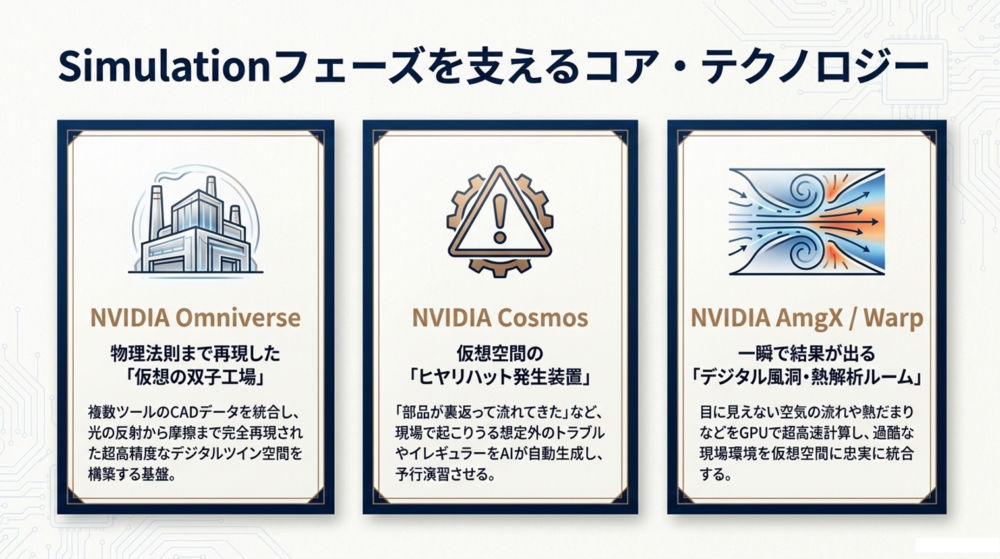
・Omniverse: 物理法則まで完全再現した仮想の双子工場(デジタルツイン)を構築する土台。実際にBMW社は、この技術で新しい工場を現実より先に仮想空間で稼働させ、計画の効率を30%向上させました。
・Cosmos: 想定外のトラブルやイレギュラーを自動生成する「ヒヤリハット発生装置」。「もしここで部品が落ちたら?」「急に人が飛び出してきたら?」といった悪条件をAIにわざと経験させます。
・AmgX: 一瞬で結果が出る「デジタル風洞・熱解析ルーム」。目に見えない空気の流れや熱のこもり具合を瞬時に計算し、過酷な現場を再現します。
【Trainingを支える技術】
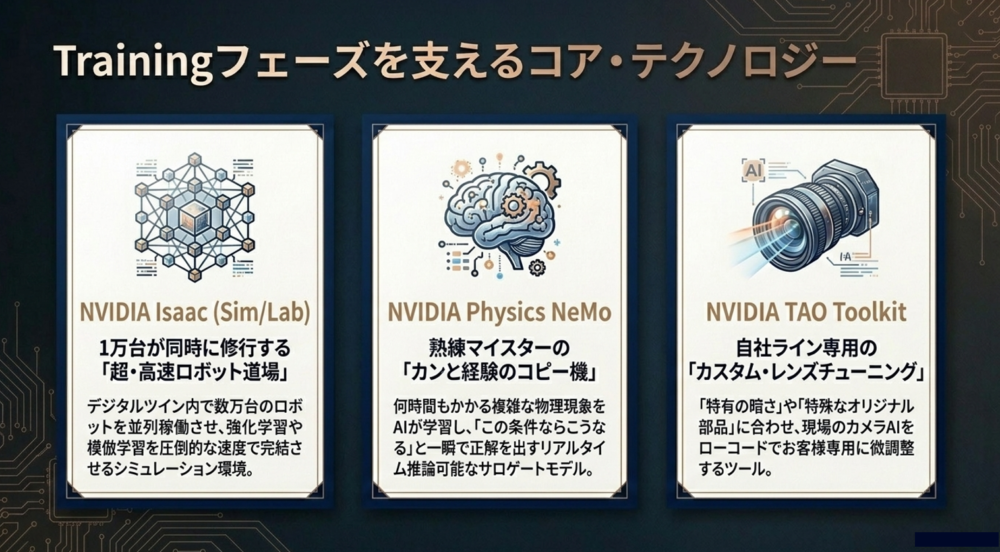
・Isaac (Sim/Lab): 道場の建物(Sim)と特訓プログラム(Lab)を組み合わせた高速並列学習システム。AIが失敗から自ら学び、最適な動きを自力で見つけ出します。
・Physics NeMo: 熟練マイスターの「カンと経験」をAIに一瞬で計算させる仕組み。複雑な物理現象をAIに理解させます。
・TAO Toolkit: 自社特有の暗さや特殊部品に合わせて、カメラAIの眼を微調整する「カスタム・レンズチューニング」。AIの専門知識がなくても、自社の製品画像を読み込ませるだけで独自のAIが完成します。
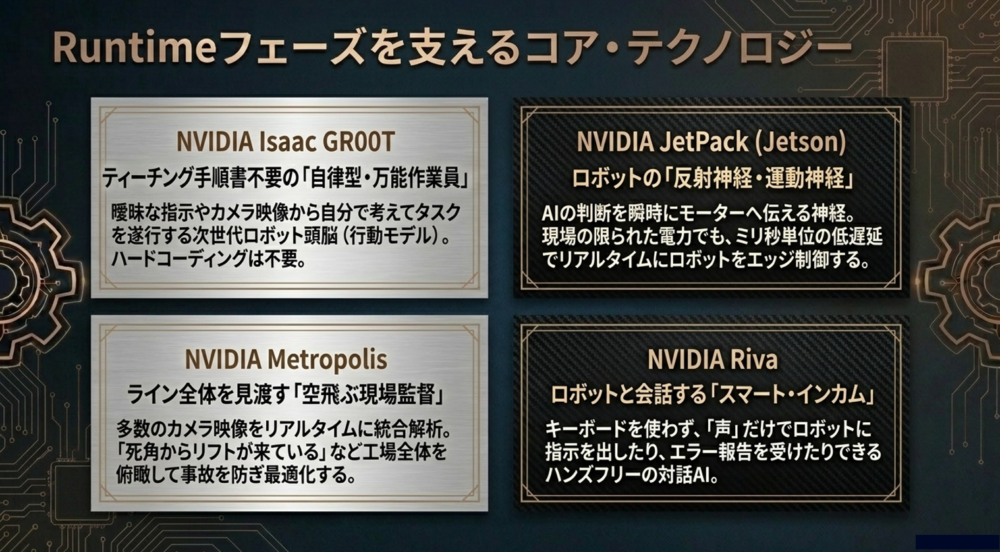
【Runtimeを支える技術】
・Isaac GR00T: 手順書不要で、自ら考えてタスクを遂行する次世代のロボット頭脳。「リンゴを取って」というような人間の曖昧な言葉を理解し、どう動くべきか自分で考えます。
・JetPack (Jetson): エッジ(現場)での低遅延な制御を担う、ロボットの「反射神経・運動神経」。手のひらサイズのコンピューターにスーパーコンピューター並みの処理能力を詰め込み、現場の限られた電力でもタイムラグなしにロボットを動かします。
・Metropolis: ライン全体を俯瞰し、死角からの事故を防ぐ「空飛ぶ現場監督」。
・Riva: 音声のみでロボットへの指示や対話が可能な「スマート・インカム」。

【保存版】NVIDIA フィジカルAI「工場のアップグレード」早見表
本記事で解説した「仮想空間で環境を作り(Simulation)・頭脳を鍛え(Training)・現場へ持ち込む(Runtime)」という【Sim2Real】アプローチの全体像をまとめました。各ソリューションはモジュール式に連携し、段階的な導入が可能です。
| フェーズ | フレームワークの名称 | 工場の何に当たるか? | 解決する現場の課題・役割 |
|---|---|---|---|
| Simulation | NVIDIA Omniverse | 仮想の双子工場 | 現実のラインを止めずに何度でもノーリスクでテストできるデジタル試作空間 |
| Simulation | NVIDIA Cosmos | ヒヤリハット発生装置 | 想定外のトラブルやイレギュラーな状況をAIが自動で作り出し、危機を予行演習させる |
| Simulation | NVIDIA Warp / AmgX | デジタル風洞・熱解析 | 目に見えない空気の流れや熱だまりなどをGPUで計算し、過酷な現場環境を仮想空間に再現 |
| Training | NVIDIA Isaac | 超・高速ロボット道場 | 何万台ものロボットを同時に動かし、現実なら数ヶ月かかるティーチングを数時間で完了 |
| Training | NVIDIA Physics NeMo | 経験とカンのコピー機 | 複雑な物理現象をAIで学習し、「この条件ならこうなる」と一瞬で正解を出す仕組み |
| Training | NVIDIA TAO Toolkit | カスタム・レンズ調整 | うちの工場特有の暗さや特殊部品に合わせ、現場のカメラAIを専用に微調整する |
| Runtime | NVIDIA Isaac GR00T | 自律型・万能作業員 | プログラム入力は不要。曖昧な指示でも自分で考えてタスクを遂行する次世代ロボット頭脳 |
| Runtime | NVIDIA JetPack | 反射神経・運動神経 | AIの判断を瞬時に手足へ伝える神経。現場の限られた電力でも遅延なくロボットを制御 |
| Runtime | NVIDIA Metropolis | 空飛ぶ現場監督 | 多数のカメラ映像を統合し、工場全体を俯瞰して事故を防ぎ最適化する |
| Runtime | NVIDIA Riva | スマート・インカム | キーボードを使わず、「声」だけでロボットに指示を出したり対話できるハンズフリーツール |
スモールスタートを可能にする段階的導入アプローチ
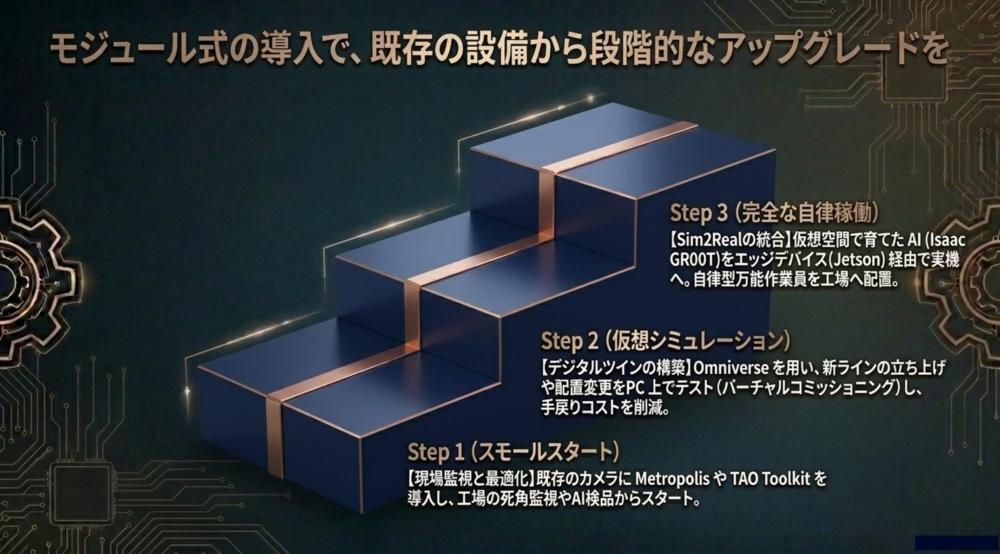
「こんな大規模なシステム、うちの工場には早すぎるのでは?」——そう思われるかもしれません。しかし、これら全てのシステムを一度に導入する必要はありません。
NVIDIAのプラットフォームはブロック玩具のようにモジュール式で設計されており、今ある設備からの段階的なアップグレードが可能です。 例えば、Step 1として既存の防犯カメラにAIを繋いで「不良品の自動検知」から始めます。効果を実感したら、Step 2で「新しい生産ラインのレイアウトをPCの仮想空間(Omniverse)で事前テスト」し、手戻りコストを削減。最終的なStep 3として「自ら考えるロボットを現場に投入」するといった具合に、お客様の現在地と予算に応じたスモールスタートが可能です。
このように、NVIDIAのプラットフォームはモジュール式で設計されており、既存設備からの段階的なアップグレードが可能ですので、お客様の現場の現在地と予算に応じたスモールスタートを実現します。
フィジカルAIを支えるハードウェア構成の重要性
この夢のような仕組みを現実の実務で安定して動かすためには、ソフトウェアの力だけでなく、それを受け止める「強靭なハードウェア基盤」が絶対に欠かせません。
仮想空間(Omniverse)で工場を丸ごと描画し、何万台ものロボットを同時学習させるには、データセンター級の強力なGPUサーバーが必要です。一方で、現場のロボットの頭脳には、小型で省電力ながら超高速で判断を下せるエッジコンピューター(NVIDIA Jetsonなど)が求められます。 各フェーズで求められる計算リソースは大きく異なるため、ボトルネックを排除した「確実なハードウェア構成」を見極めることこそが、プロジェクト成功の最大の鍵を握ります。
デジタルツインでの高精細なレンダリング、仮想空間での大規模並列トレーニング、そしてエッジ側での低遅延推論など、ご要望に応じてカスタマイズのご提案をさせていただきます。
HPC や環境構築、導入支援等をご検討の方は下記リンク先よりご相談ください。


当社では、NVIDIAプラットフォームの導入に向けた「ハードウェア構成選定のコンサルティング」を専門に承っております。
※当社では、最新アーキテクチャの早期検証や導入サポートには対応しておりません。あくまで、お客様の実行要件に対して「最も確実で、現場で安定稼働する実績あるハードウェア構成の選択」に特化してご支援いたします。
シミュレーション環境の構築からエッジデバイスの選定まで、最適なハードウェア構成についてお気軽にご相談ください。