次世代のオープンソース物理エンジン「Newton Physics」開発環境向けPC
Newton Physics Engineは、強力なGPUを使うことで、これまで数ヶ月かかっていたロボットの学習を数日〜数時間に短縮するための設計思想を持っています。

※掲載製品は参考価格となりますので、最新価格については都度お問い合わせください。
製品紹介
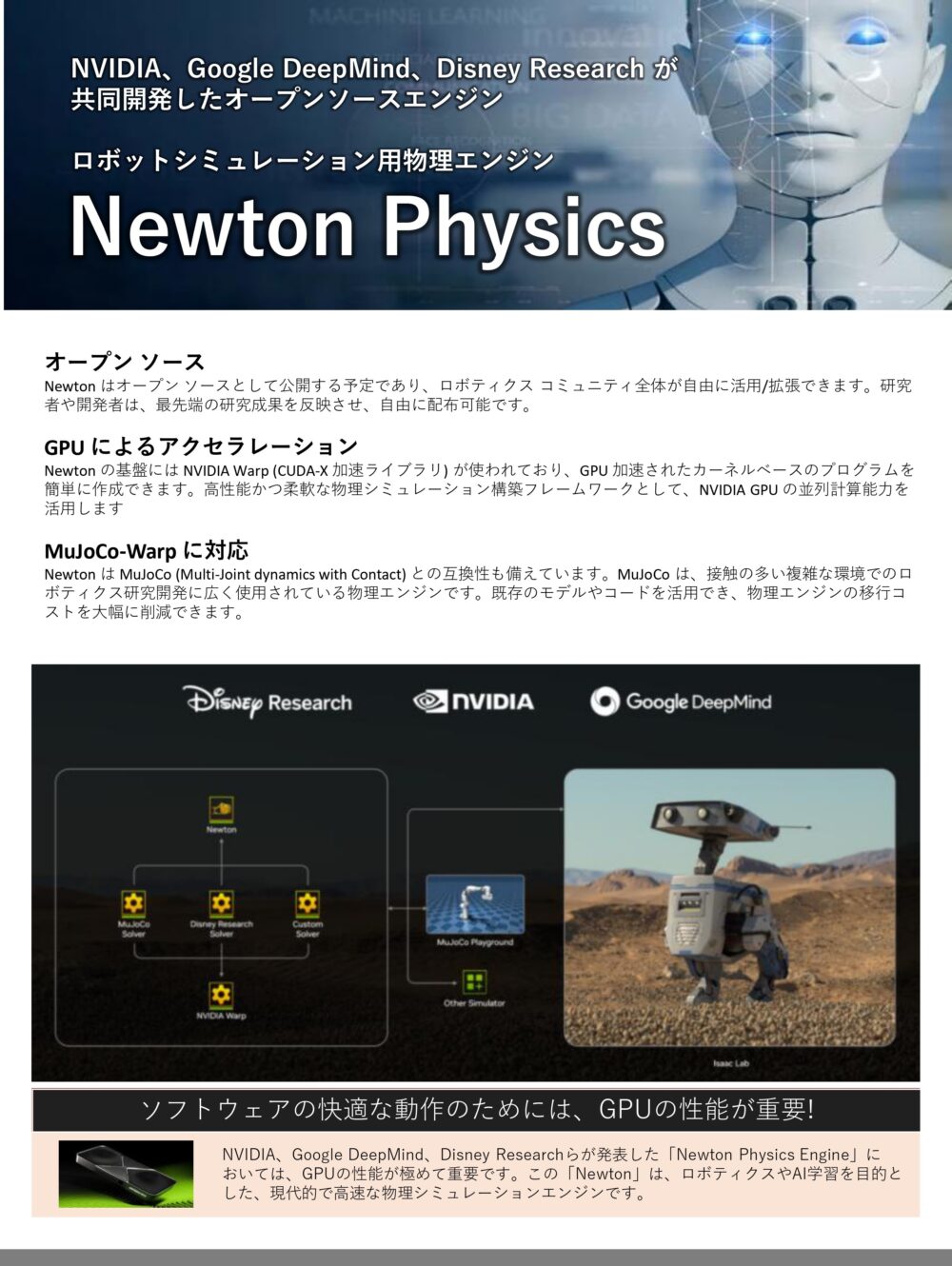
Newton Physics(ニュートン・フィジックス)は、NVIDIA、Google DeepMind、Disney Researchが共同開発した、次世代のオープンソース物理エンジンです。主にフィジカルAIやヒューマノイドロボットの開発・研究を加速させるための高度なシミュレーション環境として提供されています。
<製品の概要と主な特徴>
1. 主な特徴とシミュレーション能力
現実世界の高精度な再現: 現実の物理法則を仮想空間上で極めて忠実に再現し、ロボットの学習や動作テストを安全かつ効率的に行うことができます。
不定形物体の挙動シミュレーション: 雪や砂利の上をロボットが歩行する際の足元の崩れや抵抗など、従来のエンジンでは計算が難しい環境の再現に対応しています。
繊細なマニピュレーション: コップや果物といった壊れやすい物体を、ロボットの多指ハンドで適切な力加減で掴むといった、高度で繊細な動作のシミュレーションが可能です。
2. エコシステムと開発環境への統合
NVIDIA Isaac Lab での利用: NVIDIAのロボティクス向けシミュレーションフレームワークである「Isaac Lab」内で利用可能であり、開発者はシームレスに自社のプロジェクトへ組み込むことができます。
基盤モデルとのシナジー: NVIDIAのヒューマノイドロボット向けオープン基盤モデル「Isaac GR00T」などと組み合わせることで、AIモデルの学習プロセス(強化学習や合成データの生成)を大幅に効率化します。
3. オープンソースとしての展開
本エンジンはオープンソースとして提供されており、Linux Foundationへの寄贈も発表されています。世界中の研究者やAI開発者が、特定企業の枠組みに縛られず、高性能かつ適応力に優れたロボット開発を進められるよう設計されています。
※
Newton Physicsは、次世代のロボット(特にヒューマノイドや高度な物理AI搭載ロボット)が、現実世界で複雑なタスクをこなすための事前学習を行う、極めてリアルな仮想訓練場(シミュレーター)のコアエンジンです。
■オープン ソース
Newton はオープン ソースとして公開する予定であり、ロボティクス コミュニティ全体が自由に活用/拡張できます。研究者や開発者は、最先端の研究成果を反映させ、自由に配布可能です。
■GPU によるアクセラレーション
Newton の基盤には NVIDIA Warp (CUDA-X 加速ライブラリ) が使われており、GPU 加速されたカーネルベースのプログラムを簡単に作成できます。高性能かつ柔軟な物理シミュレーション構築フレームワークとして、NVIDIA GPU の並列計算能力を活用します
■MuJoCo-Warp に対応
Newton は MuJoCo (Multi-Joint dynamics with Contact) との互換性も備えています。MuJoCo は、接触の多い複雑な環境でのロボティクス研究開発に広く使用されている物理エンジンです。既存のモデルやコードを活用でき、物理エンジンの移行コストを大幅に削減できます。
★アプライドでは、このNewton Physicsの開発環境を快適に動作させるワークステーションをご提案致します。
<製品の概要と主な特徴>
1. 主な特徴とシミュレーション能力
現実世界の高精度な再現: 現実の物理法則を仮想空間上で極めて忠実に再現し、ロボットの学習や動作テストを安全かつ効率的に行うことができます。
不定形物体の挙動シミュレーション: 雪や砂利の上をロボットが歩行する際の足元の崩れや抵抗など、従来のエンジンでは計算が難しい環境の再現に対応しています。
繊細なマニピュレーション: コップや果物といった壊れやすい物体を、ロボットの多指ハンドで適切な力加減で掴むといった、高度で繊細な動作のシミュレーションが可能です。
2. エコシステムと開発環境への統合
NVIDIA Isaac Lab での利用: NVIDIAのロボティクス向けシミュレーションフレームワークである「Isaac Lab」内で利用可能であり、開発者はシームレスに自社のプロジェクトへ組み込むことができます。
基盤モデルとのシナジー: NVIDIAのヒューマノイドロボット向けオープン基盤モデル「Isaac GR00T」などと組み合わせることで、AIモデルの学習プロセス(強化学習や合成データの生成)を大幅に効率化します。
3. オープンソースとしての展開
本エンジンはオープンソースとして提供されており、Linux Foundationへの寄贈も発表されています。世界中の研究者やAI開発者が、特定企業の枠組みに縛られず、高性能かつ適応力に優れたロボット開発を進められるよう設計されています。
※
Newton Physicsは、次世代のロボット(特にヒューマノイドや高度な物理AI搭載ロボット)が、現実世界で複雑なタスクをこなすための事前学習を行う、極めてリアルな仮想訓練場(シミュレーター)のコアエンジンです。
■オープン ソース
Newton はオープン ソースとして公開する予定であり、ロボティクス コミュニティ全体が自由に活用/拡張できます。研究者や開発者は、最先端の研究成果を反映させ、自由に配布可能です。
■GPU によるアクセラレーション
Newton の基盤には NVIDIA Warp (CUDA-X 加速ライブラリ) が使われており、GPU 加速されたカーネルベースのプログラムを簡単に作成できます。高性能かつ柔軟な物理シミュレーション構築フレームワークとして、NVIDIA GPU の並列計算能力を活用します
■MuJoCo-Warp に対応
Newton は MuJoCo (Multi-Joint dynamics with Contact) との互換性も備えています。MuJoCo は、接触の多い複雑な環境でのロボティクス研究開発に広く使用されている物理エンジンです。既存のモデルやコードを活用でき、物理エンジンの移行コストを大幅に削減できます。
★アプライドでは、このNewton Physicsの開発環境を快適に動作させるワークステーションをご提案致します。
仕様・スペック
❶高性能 Xeon 2基とBlackwell世代 高性能 GPU搭載ワークステーション
CERVO Grasta Type-ALIES5S-BWx1
■CPU:【2基】Xeon Gold 5520+
(2.2GHz to 2.8GHz/TB 4.0GHz/28コア/56スレッド)
■メモリ:512GB(32GB x16)DDR5-5600 Registered
ECC DIMM
■ストレージ:960GB SATA3-SSD 高耐久仕様
■OS:Linux
■GPU:NVIDIA RTX PRO 6000 Blackwell Max-Q W.E.
■電源:1,200W/100V
(80 Plus Platinum 認証)
■3年間センドバック保証
❷高性能 Xeon 1基とBlackwell世代 高性能 GPU搭載ワークステーション
CERVO Grasta Type-ALIS35WC-BWx1
■CPU:Xeon w5-3535X
(2.9GHz to 4.6GHz/TB 4.8GHz/20コア/40スレッド)
■メモリ:256GB(32GB x8)DDR5-5600 Registered
ECC DIMM
■ストレージ:960GB M.2 NVMe SSD 高耐久仕様
■OS:Linux
■GPU:NVIDIA RTX PRO 6000 Blackwell Max-Q W.E.
■電源:1,200W/100V
(80 Plus Platinum 認証)
■3年間センドバック保証
CERVO Grasta Type-ALIES5S-BWx1
■CPU:【2基】Xeon Gold 5520+
(2.2GHz to 2.8GHz/TB 4.0GHz/28コア/56スレッド)
■メモリ:512GB(32GB x16)DDR5-5600 Registered
ECC DIMM
■ストレージ:960GB SATA3-SSD 高耐久仕様
■OS:Linux
■GPU:NVIDIA RTX PRO 6000 Blackwell Max-Q W.E.
■電源:1,200W/100V
(80 Plus Platinum 認証)
■3年間センドバック保証
❷高性能 Xeon 1基とBlackwell世代 高性能 GPU搭載ワークステーション
CERVO Grasta Type-ALIS35WC-BWx1
■CPU:Xeon w5-3535X
(2.9GHz to 4.6GHz/TB 4.8GHz/20コア/40スレッド)
■メモリ:256GB(32GB x8)DDR5-5600 Registered
ECC DIMM
■ストレージ:960GB M.2 NVMe SSD 高耐久仕様
■OS:Linux
■GPU:NVIDIA RTX PRO 6000 Blackwell Max-Q W.E.
■電源:1,200W/100V
(80 Plus Platinum 認証)
■3年間センドバック保証
用途・実績例
Newton Physicsは、現実世界とのギャップ(Sim-to-Realギャップ)を極限まで埋めることに特化しており、主に最先端のロボティクス分野の研究・開発で活用されています。
1. 主な用途(ユースケース)
ヒューマノイドロボットの歩行・姿勢制御学習: 雪道、砂利道、凹凸のある不整地など、足元が崩れたり摩擦抵抗がリアルタイムに変化したりする「不定形環境」での複雑な歩行シミュレーション。
繊細な多指マニピュレーション(物体操作)の訓練: コップや果物など、壊れやすい物体や滑りやすい物体を、ロボットハンドが適切な力加減で掴むための高度な接触ダイナミクスの計算。
Sim-to-Real(仮想から現実への移行)のデータ生成: 現実世界では危険を伴うテストや、膨大な時間がかかる試行錯誤を仮想空間で超高速に繰り返し、安全かつ確実に現実の実機ロボットへスキルを移行させるための学習データ生成。
視覚言語アクション(VLA)モデルの統合テスト: 「NVIDIA Isaac GR00T」などのAIモデルと組み合わせ、ロボットが人間の複雑な指示を理解し、物理法則に則った正しい行動をとれるかを仮想空間上で検証。
1. 主な用途(ユースケース)
ヒューマノイドロボットの歩行・姿勢制御学習: 雪道、砂利道、凹凸のある不整地など、足元が崩れたり摩擦抵抗がリアルタイムに変化したりする「不定形環境」での複雑な歩行シミュレーション。
繊細な多指マニピュレーション(物体操作)の訓練: コップや果物など、壊れやすい物体や滑りやすい物体を、ロボットハンドが適切な力加減で掴むための高度な接触ダイナミクスの計算。
Sim-to-Real(仮想から現実への移行)のデータ生成: 現実世界では危険を伴うテストや、膨大な時間がかかる試行錯誤を仮想空間で超高速に繰り返し、安全かつ確実に現実の実機ロボットへスキルを移行させるための学習データ生成。
視覚言語アクション(VLA)モデルの統合テスト: 「NVIDIA Isaac GR00T」などのAIモデルと組み合わせ、ロボットが人間の複雑な指示を理解し、物理法則に則った正しい行動をとれるかを仮想空間上で検証。





