【次世代モビリティ】NVIDIA Alpamayo が牽引するAX時代のR&D戦略
次世代モビリティ開発を加速するHPC基盤の最適解 ~NVIDIA Alpamayo AlpaSim NuRecが牽引するAX時代のR&D戦略~
自動運転システムの開発は、従来のルールベースやモジュール式のアプローチから、AIが状況を統合的に理解し判断を下すエンドツーエンドの「AX(AI Transformation)」環境へと移行しています。NVIDIAが提供する「Alpamayo」「AlpaSim」「NuRec」は、安全性と説明可能性を両立したレベル4自動運転の社会実装に向けた最新のエコシステムです。
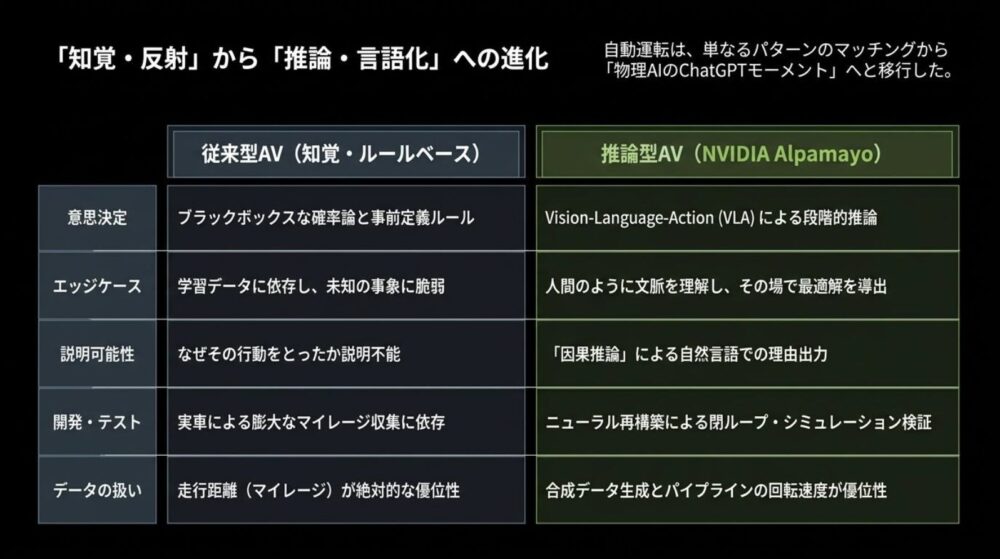
NVIDIAの自動運転AI基盤「Alpamayo(アルパマヨ)」は、従来のパターン認識に依存した自動運転から脱却し、AIが人間のように「推論(考えて判断)」する仕組みを取り入れることで、安全性と信頼性を劇的に高めています。
NVIDIAの創業者兼CEOであるジェンスン・フアン氏は、Alpamayoの発表に際して「物理AI(Physical AI)における『ChatGPTの瞬間』が到来した」と表現しています。NVIDIAの自動運転AI基盤「Alpamayo」が自動運転における「ChatGPT」に例えられるのは、AIが単なるパターン認識を越え、現実世界を真に理解し、推論し、人間のような判断力で行動し始めたという「ブレイクスルー」を象徴しているためです。
エンタープライズのR&D部門がこれらを最大限に活用し、物理法則に基づくシミュレーション(CAE)とAIモデルを融合させるために必要なHPC要件をレポートします。
NVIDIA自動運転AIエコシステムの全貌
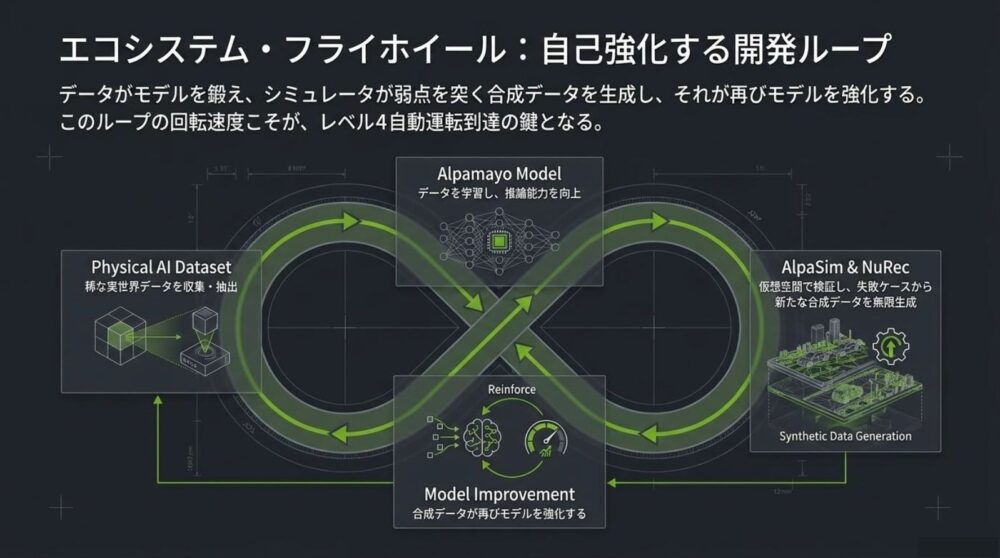
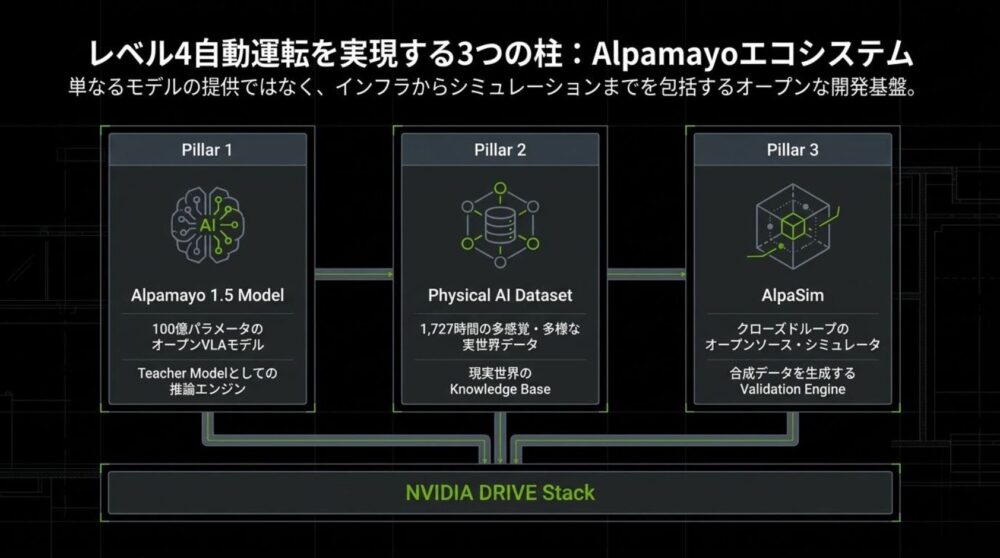
自動運転の検証を実道からスケーラブルな仮想環境へと移行させるため、以下の3つのコンポーネントが連携して高度な閉ループ(Closed-loop)テスト環境を構築します。
| コンポーネント | 役割 | 技術的特徴 |
|---|---|---|
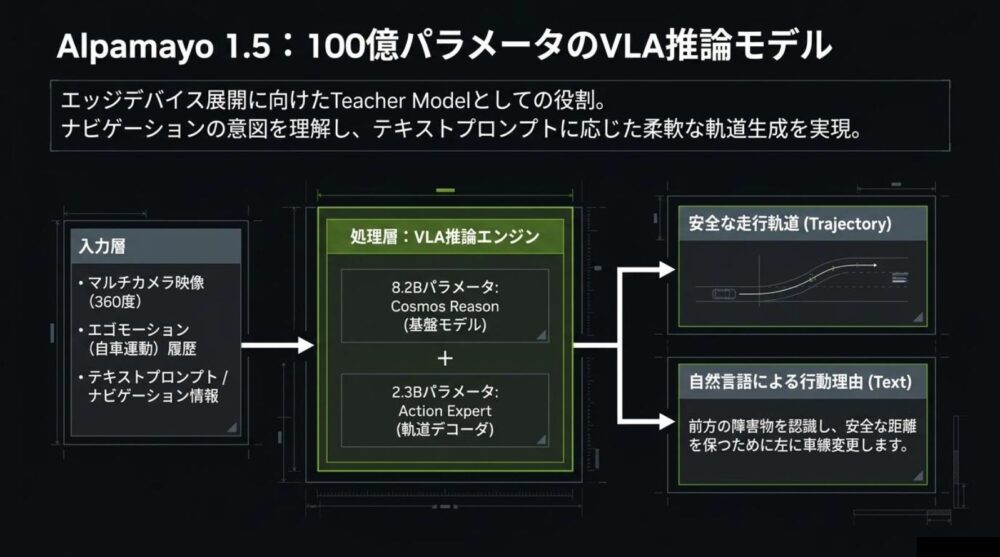
| NVIDIA Alpamayo | 推論ベースの自動運転VLAモデル | 100億パラメータ 連鎖的推論 (Chain-of-Thought) による意思決定の透明化 |
| NVIDIA AlpaSim | 開発向け自動運転シミュレータ | マイクロサービスアーキテクチャによる水平拡張 パイプライン並列処理 |
| NVIDIA NuRec | 3Dニューラル再構成エンジン | 実環境のカメラやLIDARデータからOpenUSDベースの対話的3D空間を生成 |
AX時代におけるエンタープライズR&D向けHPC要件
これらの最先端ツール群を社内の開発パイプラインに統合するには、単なるサーバーの増設ではなく、AIの学習からシミュレーションの並列実行までを見据えた統合的なHPCソリューションが不可欠です。
1 . 大規模推論モデルを支える高密度演算リソース
Alpamayo(VLAモデル)は、映像入力から車両の軌道と「なぜその判断をしたのか」という推論の論理を同時に出力します。この大規模モデルの継続的なファインチューニングや、車載用の小規模エッジモデルへの蒸留(Distillation)には、極めて高い演算能力が必要です。最新のGPUを搭載し、ノード間を広帯域・低遅延なネットワーク(InfiniBandなど)で結合した、分散学習に最適化されたクラスター環境が求められます。
2 . 水平拡張を前提としたシミュレーション基盤
AlpaSimはマイクロサービスアーキテクチャを採用しており、ジョブのスケールアウトが容易です。レンダリング、交通挙動の計算、センサーシミュレーションなどの各プロセスを並列実行するため、Kubernetes等のコンテナオーケストレーションに対応し、ワークロードに応じて計算リソースを柔軟に割り当て・管理できるクラウドネイティブなHPCインフラが必須となります。
3 . 膨大なセンサーデータを処理する高速ストレージ
NuRec(Neural Reconstruction)を用いて現実世界のデータから高忠実度な仮想テストコース(3D Gaussian Splatting等)を生成するプロセスでは、膨大なI/Oが発生します。また、1,700時間以上に及ぶNVIDIAの「Physical AIオープンデータセット」を取り扱うため、分散ファイルシステムとNVMeストレージを組み合わせ、GPUへのデータ供給ボトルネックを完全に排除する高速ストレージソリューションが必要です。
導入によるビジネスインパクト
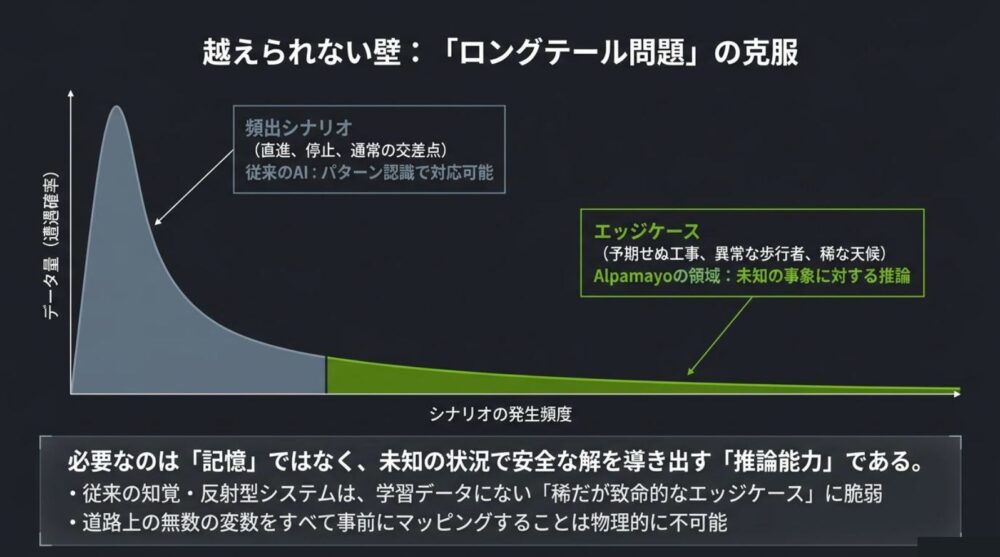
①エッジケースの安全な検証 実世界では遭遇・再現が困難な危険事象をNuRecとAlpaSimで仮想化し、安全性を損なうことなくモデルのストレステストを実施できます。
②開発サイクルの劇的な短縮 HPC上で数千のシナリオを並列で実行することで、モデルのアップデートが安全性に悪影響を及ぼさないか(リグレッションテスト)を即座に検証可能です。
③判断のブラックボックス化解消 Alpamayoが持つ連鎖的推論能力により、AIの意思決定プロセスが言語化されるため、デバッグの効率化だけでなく、将来的な規制対応への信頼性担保にも繋がります。
閉ループシミュレーション(クローズドループ・シミュレーション)のデータフロー
データが実環境の取得からAIモデルの推論へと流れるプロセスは、順序立てて同期・実行される必要があります。
| ステップ | 項目 | 詳細 |
|---|---|---|
| ① | 実世界データのインジェストとニューラル再構成 | NuRecが、テスト車両から収集された膨大な生データ(LIDAR、カメラ映像など)を読み込みます。数千時間の走行ログから道路の幾何学情報や環境のテクスチャを高精度に抽出し、3D空間の再構成を実行します。 |
| ② | OpenUSDフォーマットによる3D空間アセット化 | 生成された高忠実度な環境データは、OpenUSD(Universal Scene Description)フォーマットの3Dアセットとして出力されます。 これにより大規模かつインタラクティブな物理シミュレーション空間の土台が完成します。 |
| ③ | AlpaSimによる動的シナリオの注入 | 構築された3D環境上に、AlpaSimがエッジケースや動的な交通エージェント(他車両、歩行者、天候変化)を配置します。マイクロサービスアーキテクチャにより、無数の異なるシナリオがHPC上で並列にセットアップされます。 |
| ④ | センサーデータの リアルタイムレンダリング | 仮想空間内のテスト車両が搭載する各種センサー(カメラ、LIDAR、レーダー)の視点から、HPCのGPUクラスターが環境データをリアルタイムにレンダリングします。 |
| ⑤ | VLAモデルへの入力と 環境のフィードバック | レンダリングされたセンサーデータがAlpamayoなどのAIモデル(VLAモデル)に入力されます。 AIが車両のステアリングやブレーキを推論・制御すると、その結果が即座にAlpaSimにフィードバックされ、次フレームの環境が再計算されます。これが閉ループとしてミリ秒単位で循環します。 |
NVIDIA Alpamayo 開発環境に最適なHPCハードウェア アプライド製ワークステーション
ご要望に応じてカスタマイズのご提案をさせていただきます。 HPC 導入をご検討の方は下記お問い合わせフォームよりご相談ください。

資料ダウンロード